Al's Robotics....
| Site
Index |
| Site Index |
| Rambo Auto Tools |
| Robotics Events |
| Linux Computing |
| Reading Books |
| Latest
News |
new information added to the Robux Project Pages click here for more info |
S-Core R1.1
MicroMouse
S-core is the joint effort of myself (Al R Martin) and James Carter. We are both users of the Robot Builder forum and had recently done the 2004 observatory robotics event. A little while after the event plans were being made for the annual MINOS event and also an event at TIC, both are MicroMouse competition which neither of us had done before so we started talking about how we could set about building a mouse in under 6 weeks. After a few discussions we decided that James would do the mechanics of the mice while I would concentrate on the electronics and programming the mice, and so that we both of us had something to play with at the end of it all we would indeed build two mice.
S-Core had the intention of being designed for two tasks, the main task
being able to navigate a maze and with a bit more time being able to solve
a maze. The second task was to be able to compete in the mini sumo competition.
So to do this James built us a 2 motor powered chassis that fitted into
a 100x100 mm footprint.
About 3 weeks away from the MINOS 04 event at the Royal Holloway University of London, I received the finished chassis from James. So with little time to spare I got down to the job of code writing for the 4 PIC micro controllers aboard the mice which is no easy task when you work 5 day a week from 8 to 6 doing none other then electronics.
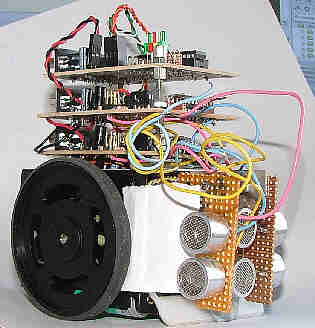
The Ultrasonic mouse in Prototype stage.
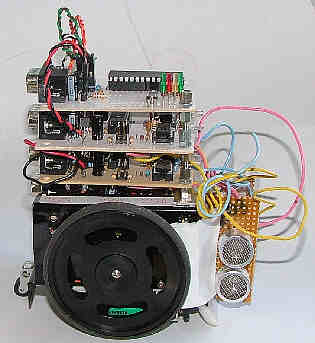
The IR mouse in Prototype stage.
Having built many different types of robots over the years I had come to use many different types of sensors, so armed with my previous knowledge I set about using both IR sensors and ultrasonic sensors. As I had two basses to play around with I made one up using ultrasonic sensors and other using IR sensors. After a little time paying around with the test code I had written for both robots and getting them to track my makeshift maze constructed of paper I decided that the ultrasonic were giving the best performance in all conditions.

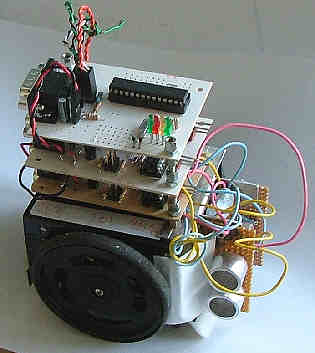
Above: Photo of the dual ultrasonic ranging boards whilst in the building stage.
Not having thought much about actually taking part in the up coming robotics event I had just “got on” with coding and without thinking too much I had set up all the routines in the code to track the right hand wall. Mmm no big deal to me at the time, until I came to read the rules a little closer, were it tells you that if your mouse tracks anything other than the left wall your mouse is classed as a maze solver, Doh. With nothing to lose I carried on with refining the code for the mice using the right hand wall as the guidance aid. The big day came on the Saturday. Early morning I get my stuff and robots packed up into the car and shoot off to London for the day, the first day of the event being filled with useful lectures of what other people had done and also a video from David Otten with how the Japanese do the MicroMouse. Followed by a little test in a real maze for the S-Core, which it handled pretty well for it’s first time. Around 6 P.M. I packed up my stuff and headed back home for the night (only a 100 miles or so to drive). Finally got home had some dinner and stated to think Mmmm wouldn’t be too tricky to swap all the rights over to lefts now would it?, well an hour or so latter all done. By which time it was getting late so I left the testing for the next day. On the Sunday I got up early again shot off once again to London for the last day of the MINOS event. Had a few test runs at the maze and noted a problem, somewhere along the lines I must have forgotten to change one of the routines over, the result of this was the mouse getting too close to the wall. Due to the size of the wheels and the rubber tyre fitted to them the mouse on several occasions tried to climb the maze walls which resulted in it falling over. Anyhow after a two and half minute run with a few touches I was all done on the qualifiers. I had a little play around with some of the variables in the code but I couldn’t make any real changes, so I decided to retire early and sit back and relax.
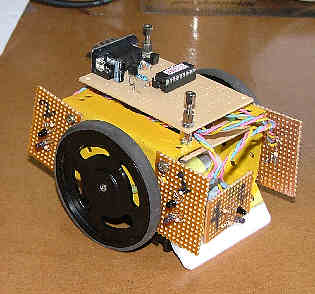
S-Core side view
In all the first mice have been a good exercise in building up a robot
that has the ability to compete against others and more importantly can
now navigate a maze without help. The challenge also helped to build up
a good team effort between me and James, which will no doubt come in handy
in the near future. As you can probably guess MKII is just around the
corner. At the time of writing up this web page I have spent the day drawing
up plans for the second-generation mice.
Electronics description:
There are four processing
boards on this mouse, each of which has a dedicated operation task. The
first processing board controls the motors. This generates the PWM needed
to drive the motors at a proportional speed. The two second boards control
the ultrasonic range finding capability of the robot, they are custom
versions of the USPR_1. The last board is the main processing board that
tells all the subsystems what to do and ultimately controls the entire
robot whilst it navigate the maze.
September 2006:
Well doesn’t time fly, it’s been 3 years or so now since we entered micromouse and now we’re back and we Will be better then ever cramming in more technology and gadgets then you could ever believe, this time we’re taking on the big boys, MIT and the Japanese micromouse’s .
Read more on our new
design, visit QDL2’s site Sponsored
my Qtronics Design Ltd.
Web pages built and © by A R Martin E-mail at:
Home-page Robots Tutorials Links E-mail Circuits Events BEAM PIC Microchip Robotics Shop Computers FMM-RobotWars Sponsors Suggested reading Ebay Listings Serial Speed Controllers MicroMouse Walkers Driller-Killer Laptops Excaliber Robot Retox Drill Robot Robot motors Robot Builder Google Robux Project gorobotics Robot Cafe Robotics Solar Navigator PIC Axe Tech Supplies MUTR GSM Control Home Automation RC tracker Qtronics Design - Electronics & Firmware Design Artist R C Martin http://www.speedace.info/qtronics.htm http://www.solarnavigator.net/qtronics.htm http://www.elecdir.com/site/store/23197/index.html http://www.robotbuilder.co.uk/forum/topic.asp?whichpage=2&TOPIC_ID=861ᶱ